

Autonomous Vehicle
An autonomous robot system with dual-mode control, combining independent navigation with real-time user monitoring and override through a web-based interface (2025)
Designed an interaction system for a mobile autonomous vehicle, translating real-time sensor data, navigation states, and robot behaviors into a clear web-based operator experience. The interface allowed users to monitor live telemetry, switch between manual and autonomous modes, adjust parameters, plan routes, and debug system behavior during field testing.
Team: Yui Guo, Boru Pan, Qingyun Ying; My Role: I focused on designing the operator workflow, control logic, and feedback structure for the robot interface. I mapped key interaction states across manual control, autonomous navigation, wall-following, obstacle response, and emergency stop, then integrated sensing and control behaviors into a usable web-based debugging experience. I also tested and refined the system in the field to improve reliability, and user control. I also supported hardware integration and field testing to improve system reliability and user control.
System Architecture
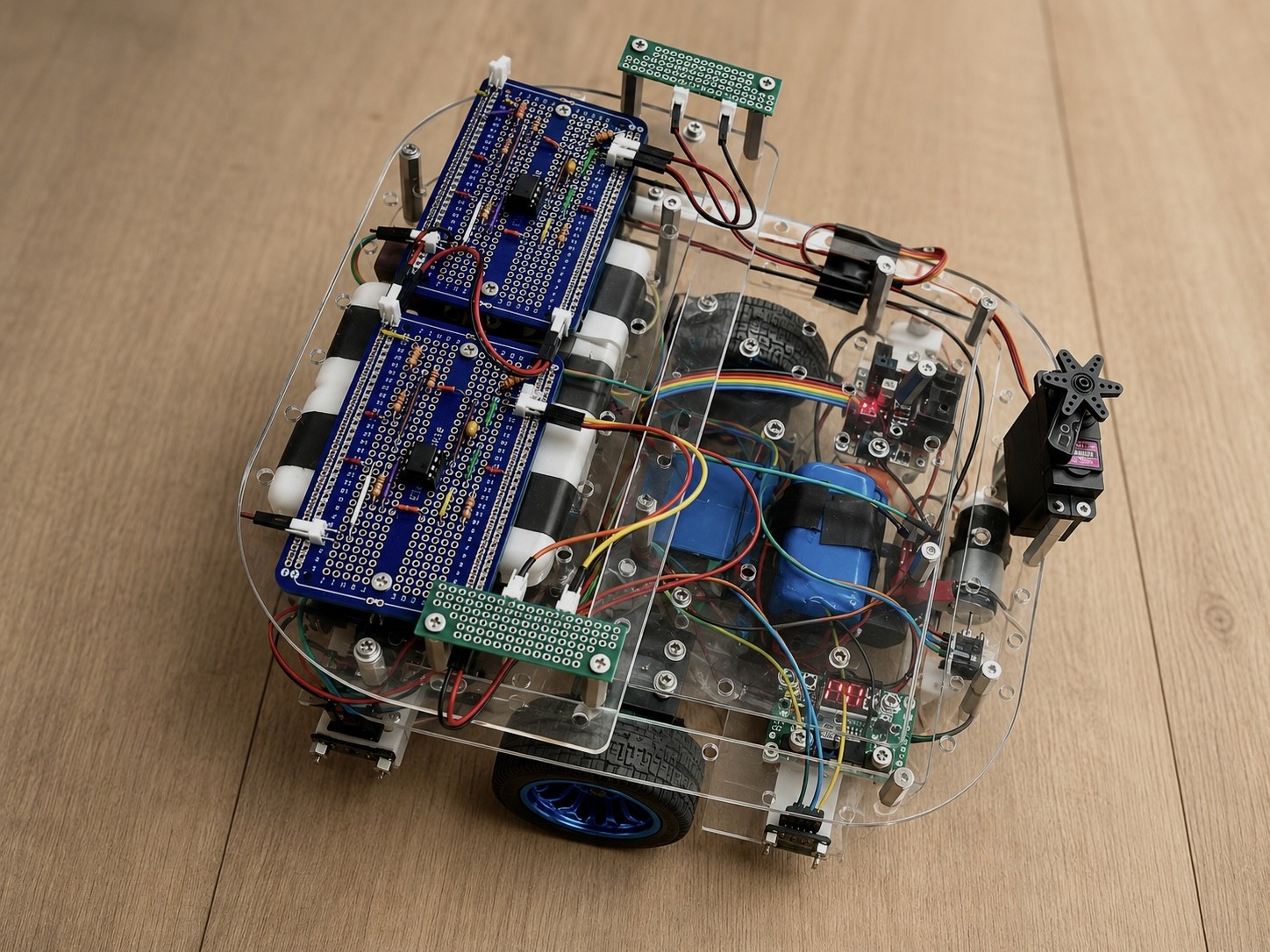
The system architecture is built around a dual ESP32-S3 controller setup that integrates ToF sensing, Vive-based localization, web-based control, and autonomous motion control. Sensor data, health monitoring, and communication modules feed into the main control system, which coordinates navigation, wall-following, and attack behaviors. A closed-loop PID wheel control system with encoder feedback enables stable motion execution and real-time autonomous response.

Key Capabilities
The robot integrates browser-based control and debugging with live telemetry and runtime tuning, while using three ToF sensors for wall-following, obstacle detection, and recovery behaviors. Dual Vive trackers provide global pose estimation and waypoint navigation, supporting boundary-aware path planning and autonomous route execution. A servo-actuated attack mechanism enables both autonomous and manual interaction modes.

Iteration






The vehicle evolved from a 3-wheel manual prototype into a 4-wheel autonomous platform.
The structure also grew from a single-layer chassis to a three-layer system, which created more space for wiring, sensors, and control modules while improving overall stability.
Control Center Interface
Developed a web-based control system for real-time vehicle operation, debugging, and parameter tuning.
The interface supports manual control, autonomous mode switching, live telemetry, path planning, system health monitoring, and emergency stop functions.